При построении относительно нестандартных двигателей (то есть там, где оставлено регулирование с помощью РХХ) довольна частая ситуация – полное или частичное отсутствие холостого хода, когда заставить работать его можно только постоянно подгазовывая, то есть выводя из режима ХХ, т.к система регулирования ХХ напрочь отказывается стабилизироваться. Иногда для получения более менее стабильных оборотов приходится прогревать двигатель почти до рабочей температуры.
Очевидно, что система поддержания ХХ нуждается в основательной настройке. Для начала нужно уяснить, что для поддержания ХХ в системах впрыска, содержащих в своем составе РХХ существуют два механизма регулирования – грубый, с помощью РХХ, и точный, с помощью УОЗ. Обе системы начинают работать только если обороты двигателя опускаются ниже оборотов первого переходного режима и система выставляет признак работы на ХХ. Иногда, заглянув в диагностику, мы видим УОЗ ХХ колеблющийся около нуля, хотя в прошивке – желаемый УОЗ на ХХ градусов 18 – 20 . На лицо полное отсутствие четкой взаимосвязи работы между регуляторами, РХХ неправильно подает воздух, а система УОЗ-ом пытается исправить ситуацию.
Что же делать? Браться за инженерный блок J 5 (J 7 ) Оnline Tuner. Но сначала немного теоретической информации:
П‑Регулирование.
П‑регулятор который управляет углом зажигания и предназначен для точного регулирования, те регулирования при небольших отклонениях оборотов от желаемых. Если разность желаемых оборотов и текущих больше переменной «Зона нечувствительности», происходит изменение угла зажигания на ХХ:
UOZ = UOZXX + KUOZ * EFREQ, где:
UOZXX – УОЗ на ХХ минус Коррекция УОЗ на ХХ;
EFREQ – Текущая ошибка оборотов при регулировании.
MINEFR – Зона нечувствительности.
KUOZ – Коэффициент коррекции УОЗ, принимается равным «Пропорциональному коэффициенту регулятора УОЗ_ 1 (высокие обороты)», если ошибка положительна (EFREQ > 0 ) или «Пропорциональному коэффициенту регулятора УОЗ_ 2 (низкие обороты)», если ошибка отрицательная (EFREQ 0 ).
Величина приращения УОЗ (KUOZ * FREQ) ограничивается величинами UDMIN и UDMAX взятыми из соответствующих таблиц «Минимальное и Максимальное смещение УОЗ».
Физически данное регулирование регулирование служит для обеспечения возврата фактических оборотов к желаемым: чем больше отличие оборотов от желаемых оборотов, тем больше изменится УОЗ в сторону для обеспечения возврата к ним, «Пропорциональный коэффициенту регулятора УОЗ 1 » увеличивает обороты, если они меньше желаемых, а «Пропорциональный коэффициент регулятора УОЗ 2 » снижает их.
ПИ-Регулирование.
Второй «регулятор» отвечает за работу РХХ. Механизм его регулирования немного сложнее П‑регулятора, т.к. у РХХ нет четко заданной уставки для ХХ, РХХ приходится регулировать от того положения в котором он находится в момент наступления ХХ. Поэтому очень важно чтобы когда этот момент наступает, РХХ находился как можно ближе к тому положению в котором будет осуществляться регулирование. Для этого необходимо правильно настроить возврат оборотов их режима ПХХ.
Работа ПИ-регулятора определяется формулой:
SSM = SSM + TMFR * (KFRI * EFREQ + KFR * (EFREQ – EFRET)),
SSM – положение РХХ, шаг.
TMFR – Жесткость регулятора частоты вращения – коэффициент, задающий скорость изменения положения РХХ в зависимости от разницы оборотов от заданных.
KFR – Пропорциональный коэффициент РХХ – как и в случае с УОЗ регулированием, определяет отклонение РХХ в зависимости от разницы оборотов. Чем больше разница, тем больше будет смещение РХХ от текущего.
KFRI – Интегральный коэффициент РХХ – временной коэффициент, изменяет шаги РХХ, в зависимости от времени непопадания в заданные обороты. Чем дольше по времени обороты не были равны заданным, тем больше будет отклонение РХХ.
EFREQ – Текущая ошибка оборотов при регулировании.
EFRET – Ошибка оборотов на предыдущем цикле регулирования.
Если разница оборотов заданных и текущих превысила «Ограничение оборотов для интегратора», то она принимается равной этой величине.
Физический смысл регулятора сводится к тому, что чем больше отклонились обороты от заданных и чем больше по времени они были отклонены, тем больше будет разница в положении РХХ между текущим и следующим, то есть, в отличие от П‑регулятора УОЗ, регулирование осуществляется ступеньками, РХХ будет приближаться к положению регулирования не мгновенно, а значит возможно перерегулирование – срыв ХХ в синусоидальные колебания оборотов со значительной амплитудой.
Практика.
Очевидно, что мы никак не можем напрямую повлиять на текущее положение УОЗ или РХХ на ХХ. Единственное чем мы можем оперировать, это коэффициентами, причем во время настройки РХХ нужно чтобы нам не мешал УОЗ и наоборот.
Для начала нужно выбрать желаемые обороты ХХ. Рекомендуется выбирать обороты чуть выше гарантированных, для того, что бы избежать проблем при движении на ПХХ и при значительном изменении нагрузки.
Настройка проводится в три этапа:
Этап 1 . Предварительная настройка ПИ-регулятора РХХ.
Выставляем смещение РХХ при включении вентилятора в 0 (По окончании настройки его нужно вернуть обратно). Выставляем «Ограничение оборотов для интегратора» примерно на две трети значения разности между желаемыми оборотами ХХ и «вторым переходным режимом».
Пример: ХХ = 1100 , обороты второго режима = 1400 , тогда «Ограничение оборотов для интегратора» будет ( 1400 – 1100 ) * 2 / 3 = 200 .
Это необходимо, чтобы «подхватывалось» регулирование в момент входа в ХХ и при этом не было бы перерегулирования и резкого провала по оборотам. 2 / 3 – относительный параметр, полученный практически, придерживаться его необязательно, но, в любом случае, делать «Ограничение оборотов для интегратора» больше разницы ХХ и ХХ 2 нет смысла.
Далее, открываем «Окно диагностики» в J 5 OLT, «Прямое управление ИМ» – фиксируем УОЗ, например, на 16 градусах. Далее, устанавливаем интегральный коэффициент в 0 и настраиваем только «Пропорциональный коэффициент». Нужно установить такой пропорциональный коэффициент, чтобы РХХ вставал навстречу изменяющимся оборотам. Это хорошо видно на графиках. Обороты должны перестать быть волнообразными, если они будут рваными, но удерживаться рядом с заданными, переходим к настройке П‑регулятора УОЗ.
Этап 2 . Настройка П‑регулятора УОЗ.
После того как мы добились желаемого ХХ, который не плавает волнами, надо настроить точное регулирование УОЗ-ом. Для этого нужно иметь представление, в каких пределах мы можем с помощью УОЗ влиять на обороты. Открываем «Окно диагностики» в J 5 OLT, «Прямое управление ИМ» – фиксируем РХХ на среднем положении, в котором он пребывает и начинаем двигать углом, так же через прямое управление. При увеличении угла обороты должны расти, а при уменьшении – падать. Причем, если при увеличении УОЗ, они растут, то при дальнейшем увеличении они начинают опять падать. Увеличиваем, запоминаем угол, при котором обороты еще растут, но скоро будут падать, например, 27 град. (при 30 , например уже начинается спад). Дальше снижаем до порога, при котором работа двигателя еще устойчива и обороты реагируют на уменьшение УОЗ и запоминаем его, например это 5 градусов (при 3 , уже начинается неустойчивая работа или УОЗ перестает влиять).
Рассчитываем средний угол, который и будет углом зажигания. УОЗХХ = ( 27 + 5 ) / 2 = 16 .
Рассчитываем максимальную величину смещения: UDMAX = – UDMIN = 27 – 16 = 11
Выставляем в прошивке УОЗ на ХХ 16 градусов, «коррекция УОЗ на ХХ» поднимаем/опускаем так, чтобы оно было равно 0 при рабочих температурах. Смотрим, какое наполнение мотора на ХХ, и в калибровках Максимального и Минимального смещения УОЗ выше этого наполнения ставим 1 и ‑ 1 градус соответственно, а ниже и при нем, 11 и ‑ 11 соответственно, тем самым не давая вывалиться углу за рабочие пределы регулирования.
Зона нечувствительности выставляем 10 оборотов, т.к П‑регулирование это все-таки точная настройка на малых отклонениях.
На этом настройка П‑регулятора закончена и опять переходим к ПИ-регулированию с помощью РХХ, не забыв зафиксировать УОЗ на наших вычисленных 16 градусах.
Внимательно следим за изменением оборотов и на то как УОЗ этому противостоит. Необходимо, используя коэффициенты, добиться чтобы УОЗ двигался «навстречу» скачку оборотов даже несколько больше чем это нужно, как бы упреждая раскачку оборотов, то есть, УОЗ должен резко реагировать на изменение оборотов и не должен быть плавным и волнообразным.
Сначала настраиваем Высокие обороты выставляя в ноль коэфф_ 2 , и меняя коэфф_ 1 от 0 и вверх. Затем начинаем повышать коэфф_ 2 от 0 так же вверх, следя за изменением реагирования УОЗ на изменение оборотов. Если взять большие коэффициенты, то работа мотора будет резкой, жесткой на слух, произойдет перерегулирование и обороты опять начнут плясать. В идеале получаем скачущий УОЗ навстречу изменениям в оборотах.
Этап 3 . Окончательная настройка ПИ-регулятора РХХ.
Теперь нам фактически надо повторить первый этап настройки, то есть добиться ровного ХХ, меняя П‑коэффициент регулятора, не трогая И‑коэффициент, который равен 0 . Разница в том, что мы теперь делаем это при правильном угле и в будущем нам будет помогать УОЗ регулятор, но для начала нам надо правильно настроить Жесткость регулятора РХХ, чтобы она соответствовала условиям работы. Раньше ее настраивать не имело смысла, рабочее наполнение было бы другим.
Смотрим обороты ХХ/наполнение, открываем «Жесткость регулятора РХХ» и делаем так, чтобы при ХХ и наполнении на ХХ, в таблице стоял коэффициент 1 , а при отклонении от режимной точки ХХ, коэффициент увеличивался.
Получится как бы трехмерная чашка, у которой на дне область режимных точек ХХ с коэффициентами 1 и по мере отдаления от ней коэффициент растет. Тем самым обеспечивается быстрое изменение числа шагов РХХ при удалении оборотов от заданных.

Рис. 1 Примерный вид настроенной жесткости регулятора ХХ
Далее, окончательно настраиваем П‑коэффициент, к этому времени, обороты уже должны быть достаточно устойчивыми и РХХ будет колебаться несильно, отзываясь на достаточно сильные изменения оборотов. Теперь дошла очередь до И‑коэффициента. Увеличиваем его, плавно с 0 , по одному шагу, смотрим что происходит с РХХ и оборотами. Увеличиваем до тех пор, пока РХХ и за ним обороты не начнут скачком, неожиданно изменяться верх/вниз от устойчивого состояния, делаем пару-тройку шагов назад и считаем настройку оконченной.
Как показала практика, численные значения И‑коэффициента колеблется от 1 / 5 до 1 / 10 от значения П‑коэффициента.
Напоследок отметим некоторые моменты при калибровки системы по дросселю.
Если вы используете прошивки, не поддерживающие коррекцию расчетного наполнения по положению РХХ, то использовать ПИ-регулятор РХХ в стандартном виде нецелесообразно, так как при изменении положения РХХ фактически будет меняться количество воздуха, поступающее в двигатель, что никак не будет учитываться и приведет к изменению состава смеси на ХХ. В совокупности с включенным лямбда – регулированием это может вызвать раскачку оборотов и выход состава смеси за допустимые пределы.
В таких случаях сам по себе РХХ оставить в системе можно и нужно, но критерии выбора П‑коэффициента будут другими. В таких системах регулирование оборотов ХХ целесообразно возложить почти полностью на регулятор УОЗ, а регулирование количества воздуха через РХХ свести к минимуму. Для того, чтобы при включении нагрузки (например, фары) регулятор УОЗ не входил в насыщение (то есть, УОЗ не упирался в верхний предел), в качестве базового УОЗ на ХХ необходимо выбирать меньшие значения, чем описано выше. В этом случае, диапазон регулирования вверх будет шире, чем вниз. Из практики можно сказать, что средний УОЗ на ХХ необходимо опустить относительно расчетного на 3 .. 6 гр. Дополнительной мерой борьбы с провалами оборотов при включении мощных электрических нагрузок может служить увеличение значений желаемого УОЗ на ХХ в зоне оборотов ниже желаемых оборотов ХХ на прогретом двигателе.

Рис. 2 Примерный вид таблицы желаемого УОЗ на ХХ с коррекцией УОЗ на оборотах ниже ХХ
В этом случае, при резком падении оборотов отклик регулятора УОЗ будет более резким, так как коррекция УОЗ будет состоять из двух частей: прибавка, расчитанная П‑регулятором по степени ошибки оборотов плюс табличная прибавка желаемого УОЗ.
Теперь рассмотрим особенности настройки регулятора РХХ. Как уже писалось выше, нам необходимо минимизировать движение РХХ, чтобы количество воздуха через РХХ оставалось практически неизменным при регулировании. Для этого необходимо исключить И‑составляющую, путем выставления интегрального коэффициента в 0 и минимизировать пропорциональную составляющую так, чтобы РХХ в процессе регулирования РХХ не двигался (или двигался не более, чем на 1 шаг). Для настройки П‑коэффициента надо временно отключить регулятор УОЗ путем выставления его коэффициентов регулирования в 0 и убрать коррекцию желаемого УОЗ (тоже временно) на оборотах ниже ХХ (см. Рис. 2 ). Выставьте пропорциональный коэффициент РХХ в минимальное значение (но не в ноль!). Попробуйте включить фары и обогрев стекла, при этом обороты ХХ упадут ниже желаемых (двигатель при этом глохнуть не должен). Увеличивая П‑коэффициент, добейтесь того, чтобы РХХ открылся на 2 – 3 шага, при этом обороты ХХ могут и не подняться до желаемых, но повыситься. Сильнее открывать РХХ за счет пропорционального коэффициента нет необходимости, окончательную стабилизацию оборотов сделает регулятор УОЗ после его включения. Главное, чтобы РХХ компенсировал некоторую часть падения оборотов, чтобы регулятор УОЗ не «задирал» угол в верхний предел. После этого включите регулятор УОЗ и проверьте работу ХХ в том числе и при включении мощных нагрузок. В нормальном режиме регулирования (без включения нагрузок) положение РХХ должно либо оставаться неизменным, либо изменяться не более, чем на 1 шаг.
Вот, собственно и все. Этой методики вполне достаточно для того что бы настроить ХХ практически на любом авто с алгоритмическими системами впрыска, даже неисправном.
Регулятор холостого хода — устройство, позволяющее менять проходное сечение байпасного канала впускного коллектора. Проходное сечение байпасного канала играет основную роль для работы двига-теля, когда дроссельная заслонка закрывается. Воздух, который двигатель всасывает в этот момент, должен быть достаточен для поддержания заданных системой управления оборотов.
Положение регулятора холостого хода измеряется в шагах от 0 до 150 шагов. Нулевое положение регулятора должно соответствовать полностью прикрытому байпасному каналу. Для корректировки правильного положения регулятора, каждый раз после выключения зажигания, блок управления проводит процедуру парковки шагового мотора. Сначала регулятор перемещается вперед до упора в нулевое положение, а затем перемещается на 120 шагов назад, таким образом, почти полностью открывая байпасный канал для последующего пуска двигателя.
Большую роль регулятор холостого хода играет на режимах пуска и прогрева двигателя. Начальное положение регулятора позволяет обеспечить достаточное поступление воздуха на режиме пуска, за счет которого обороты двигателя после пуска превышают 1000 об/мин. Далее управляющая программа прикрывает байпасный канал (уменьшает положение шагового мотора), устанавливая расход воздуха, необходимый для поддержания заданных оборотов холостого хода см.выше. По мере работы двигателя и его прогрева, система снижает заданные обороты холостого хода именно за счет уменьшения положения шагового мотора.
Еще одной важной функцией системы является сопровождение положения дроссельной заслонки. По параметру положение шагового мотора видно, что он увеличивается при открытии дроссельной заслонки. Такой алгоритм слежения позволяет обеспечить плавное снижение (без провала и заглохания) оборотов двигателя при резком бросании педали дроссельной заслонки (переключение скоростей, движение накатом и т.д.)
Если используете средства диагностики от «НТС», то работу регулятора холостого хода можно наблюдать в динамике на экранах приборов. Различают два параметра: желаемое и текущее положение шагового мотора. Для пользователя безразлично, какой параметр использовать при проверке работы, разница между ними чисто теоретическая. Выводить на экран два параметра нецелесообразно.
Р0505 – ошибка регулятора холостого хода. Движение шагового мотора в блоке управления осуществляется с помощью специальной микросхемы – драйвера. Интеллектуальность микросхемы позволяет определять нарушения в цепях управления: обрыв цепи, перегрузка, КЗ. В этом случае система самодиагностики выдает код неисправности регулятора холостого хода.
P0506 Регулятор Х.Х. заблокирован, низкие обороты Х.Х.
P1509 Перегрузка цепи упр. РХХ
P1513 Замыкание на землю цепи упр. РХХ
P1514 Обрыв или замыкание на +12В цепи упр. РХХ
Этап 5. Настройка холостого хода по методике DimonErshov Corporation
Мальчишки и девчонки, а также их родители,
Крутые истории услышать не хотите ли?
Чёткие истории журнал покажет наш!
Ровные истории в журнале ЧИП-тюннинг-ТАЗ!
Красивый холостой ход очень важен для любого автомобиля. Когда ставим верховой распредвал с широкой фазой, то привычные холостые обороты 800-840 пропадают, машину начинает колбасить. Мотор может работать, но очень нестабильно, а может и вообще не работать.
Задача настроить красивый холостой ход не такая простая, так чтобы он нравился девчонкам. А то бывает такое, садится ко мне девушка и говорит, что-то как-то странно она у тебя работает, как-то странно гудит! Или говорят, фуу, как шумно, как трясёт! Ничего, будем устранять все эти неприятности.
Кому хочется узнать как я настраиваю в прошивке холостой ход на злом распредвалу Нуждин 10.93, прошу любить и жаловать, постараюсь доходчиво написать так, чтобы бабушка поняла! Для примера рассмотрим мою 30ю версию спортивной прошивки j7es, что я в ней нахимичил, чтобы обороты стояли как вкопанные. Для этого в программе ChipTunningPro открыл спортивную прошивку (синего цвета линия графика), в которой еще нет изменений и сравнил с 30й версией своей прошивки (зелёного цвета линия графика).
Там море всяких тонкостей, различных дифференциальных, интегральных, пропорциональных коэфицентов, но я их не трогаю, работает всё шикарно без их изменения!
У меня правило простое, кручу только те калибровки прошивки, которые понятны мне. То что мне непонятно, я не изменяю, и вам советую так поступать!
Для тех, кто делает шаг за шагом за мной, то у нас уже откатаны две самых важных калибровки — БЦН, ПЦН, это значительно облегчает задачу в настройке холостого хода.
После того, как откатали БЦН и ПЦН, вставяем их в прошивку "для езды". Делаем следующее: открываем нашу прошивку в программе ChipTuningPro, переходим в калибровку БЦН и импортируем нашу калибровку БЦН, которую откатывали. Тоже самое проделывыем с калибровкой ПЦН. Сохраняем прошивку.
Итак, теперь наконец-то начинаем делать боевую прошивку, настраиваем холостой ход, режим запуска.
1. Открываем спортивную прошивку "для езды" в программе Chip Tunning Pro, выбираем нужную карту для её открытия.
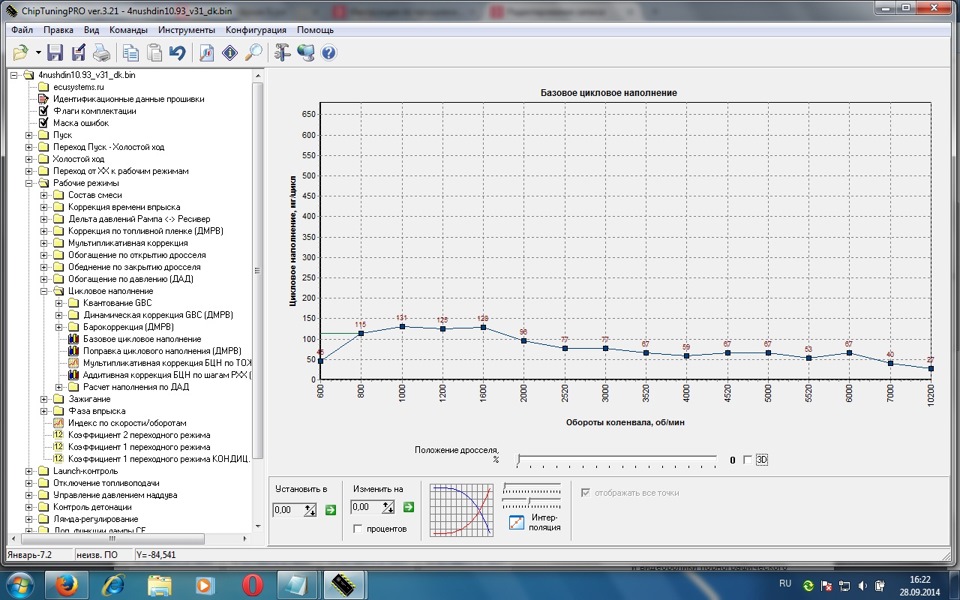
2. Для начала откроем цикловое наполнение, перейдём в калибровку «Базовое цикловое наполнение», правой кнопкой на 3х мерном графика щёлкаем, выбираем импорт калибровки. Программа попросит указать файл с калибровкой БЦН, указываем на ту последнюю нашу калибровку БЦН, которую откатывали в программе Atomic Tune или FunTune. Калибровка успешно импортировалась, теперь необходимо её немного сгладить. В самом начале графика видим, что есть такой резкий подъём. Например, на 800 об/мин наполнение 115 мг/ц, а на 600 об/мин всего лишь 45 мг/ц. Так вот, в точке 600 об/мин делаем наполнение тоже 115мг/ц. У меня так получилось, потому что во время откатки я не смог получить точки в 600 об/мин, так как задал в прошивке холостые 1100 об/мин. Ну и все резкие скачки можно сгладить в графике БЦН. По этому графику хорошо видно, как мы откатали БЦН. Чем больше точек откатали, тем он ровнее выглядит и более правдиво.
3. По желанию, если график ПЦН рваный, неровный, то также как в пункте 2, творим с калибровкой ПЦН.
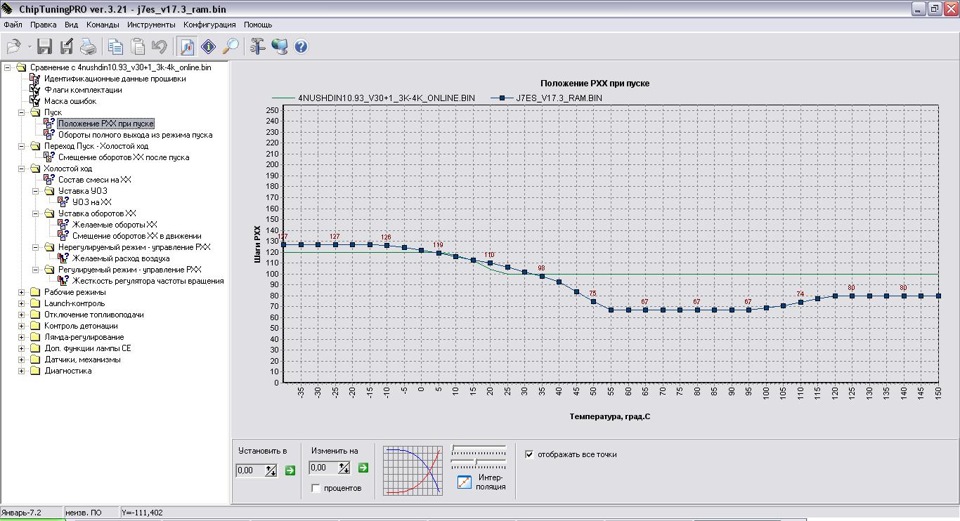
4. Положение РХХ на пуске. Так как распредвал у нас в примере с широкой фазой -282гр, он кушает много воздуха, поэтому и положение РХХ на пуске я увеличил.
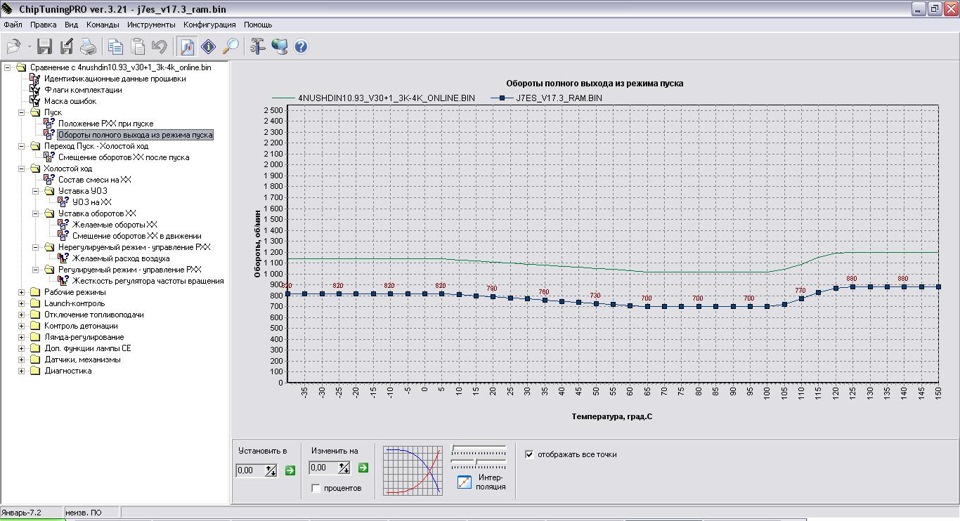
5. Обороты полного выхода из режима пуска. В стоковой прошивке, при холостых оборотах 800-840, стоят обороты выхода из режима пуска около 800. Поэтому, глядя на это и зная, что наш валик держит хорошо 1100 об/мин, делаем обороты полного выхода из режима пуска примерно 1000 об/мин.
6. Смещение оборотов после пуска, я чуток увеличил, было 150 об/мин, стало 200 об/мин.